mydetector3d training and evaluation¶
Trained Models¶
- These three models are trained based on ** Waymo ** dataset (Waymo132/train0to9) in HPC2, the model saved path is ‘/data/cmpe249-fa22/Mymodels/waymo_models/’
cfg_file=’mydetector3d/tools/cfgs/waymo_models/myvoxelnext.yaml’, ckpt file in ‘/data/cmpe249-fa22/Mymodels/waymo_models/myvoxelnext/0427b/ckpt/’
cfg_file=’mydetector3d/tools/cfgs/waymo_models/myvoxelnext_ioubranch.yaml’, ckpt file in ‘/data/cmpe249-fa22/Mymodels/waymo_models/myvoxelnext_ioubranch/0429/ckpt/’
- cfg_file=’mydetector3d/tools/cfgs/waymo_models/mysecond.yaml’, ckpt file in ‘/data/cmpe249-fa22/Mymodels/waymo_models/mysecond/0429/ckpt/checkpoint_epoch_128.pth’
evaluation result saved in ‘/data/cmpe249-fa22/Mymodels/eval/waymo_models_mysecond_epoch128’
- cfg_file=’mydetector3d/tools/cfgs/waymo_models/my3dmodel.yaml’, ckpt file in ‘/data/cmpe249-fa22/Mymodels/waymo_models/my3dmodel/0507/ckpt/checkpoint_epoch_128.pth’
evaluation result saved in ‘/data/cmpe249-fa22/Mymodels/eval/waymo_models_my3dmodel_epoch128’
Models are trained based on the complete Waymo dataset (Waymo132/trainall) in HPC2 * cfg_file=’mydetector3d/tools/cfgs/waymo_models/my3dmodel.yaml’, ckpt file in ‘/data/cmpe249-fa22/Mymodels/waymo_models/my3dmodel/0508/ckpt/checkpoint_epoch_256.pth’ continue training from 129-256 based on ckpt file in ‘/data/cmpe249-fa22/Mymodels/waymo_models/my3dmodel/0507/ckpt/checkpoint_epoch_128.pth’. * Evaluation result is saved to /data/cmpe249-fa22/Mymodels/eval/waymo_models_my3dmodel_epoch256/txtresults.
Car AP@0.70, 0.70, 0.70:
bbox AP:91.7851, 91.7851, 91.7851
bev AP:68.3034, 68.3034, 68.3034
3d AP:49.0174, 49.0174, 49.0174
aos AP:50.76, 50.76, 50.76
Pedestrian AP@0.50, 0.50, 0.50:
bbox AP:89.7635, 89.7635, 89.7635
bev AP:55.1775, 55.1775, 55.1775
3d AP:50.3953, 50.3953, 50.3953
aos AP:45.93, 45.93, 45.93
Cyclist AP@0.50, 0.50, 0.50:
bbox AP:64.8413, 64.8413, 64.8413
bev AP:51.8248, 51.8248, 51.8248
3d AP:48.8936, 48.8936, 48.8936
aos AP:51.74, 51.74, 51.74
- cfg_file=’mydetector3d/tools/cfgs/waymo_models/myvoxelnext.yaml’, ckpt file in ‘/data/cmpe249-fa22/Mymodels/waymo_models/myvoxelnext/0509/ckpt/checkpoint_epoch_128.pth’, trained from 0.
Evaluation result is saved to /data/cmpe249-fa22/Mymodels/eval/waymo_models_myvoxelnext_epoch128/txtresults
Car AP@0.70, 0.70, 0.70:
bbox AP:96.9390, 96.9390, 96.9390
bev AP:71.0638, 71.0638, 71.0638
3d AP:57.9034, 57.9034, 57.9034
aos AP:57.86, 57.86, 57.86
Pedestrian AP@0.50, 0.50, 0.50:
bbox AP:93.3127, 93.3127, 93.3127
bev AP:67.9591, 67.9591, 67.9591
3d AP:61.6305, 61.6305, 61.6305
aos AP:52.90, 52.90, 52.90
Cyclist AP@0.50, 0.50, 0.50:
bbox AP:80.0512, 80.0512, 80.0512
bev AP:70.7396, 70.7396, 70.7396
3d AP:69.7192, 69.7192, 69.7192
aos AP:67.86, 67.86, 67.86
- cfg_file=’mydetector3d/tools/cfgs/waymo_models/mysecond.yaml’, ckpt file in ‘/data/cmpe249-fa22/Mymodels/waymo_models/mysecond/0510/ckpt/checkpoint_epoch_256.pth’, trained from previous mysecond_epoch_128.
Evaluation result is saved to /data/cmpe249-fa22/Mymodels/eval/waymo_models_mysecond_epoch256/txtresults
Car AP@0.70, 0.70, 0.70:
bbox AP:92.4510, 92.4510, 92.4510
bev AP:67.9950, 67.9950, 67.9950
3d AP:50.5870, 50.5870, 50.5870
aos AP:51.00, 51.00, 51.00
Pedestrian AP@0.50, 0.50, 0.50:
bbox AP:91.2207, 91.2207, 91.2207
bev AP:56.9275, 56.9275, 56.9275
3d AP:49.9933, 49.9933, 49.9933
aos AP:47.57, 47.57, 47.57
Cyclist AP@0.50, 0.50, 0.50:
bbox AP:65.6921, 65.6921, 65.6921
bev AP:52.4134, 52.4134, 52.4134
3d AP:49.4230, 49.4230, 49.4230
aos AP:52.40, 52.40, 52.40
- New models are trained based on our converted ** WaymoKitti** dataset in HPC2, the model save path is ‘/data/cmpe249-fa22/Mymodels/waymokitti_models/’
cfg_file=’mydetector3d/tools/cfgs/waymokitti_models/pointpillar.yaml’, ckpt file in ‘/data/cmpe249-fa22/Mymodels/waymokitti_models/pointpillar/0504/ckpt/checkpoint_epoch_128.pth’
cfg_file=’mydetector3d/tools/cfgs/waymokitti_models/second.yaml’, ckpt file in ‘/data/cmpe249-fa22/Mymodels/waymokitti_models/second/0502/ckpt/checkpoint_epoch_128.pth’
cfg_file=’mydetector3d/tools/cfgs/waymokitti_models/voxelnext_3class.yaml’, ckpt file in ‘/data/cmpe249-fa22/Mymodels/waymokitti_models/voxelnext_3class/0430/ckpt/checkpoint_epoch_72.pth’
cfg_file=’mydetector3d/tools/cfgs/waymokitti_models/my3dmodel.yaml’, ckpt file in ‘/data/cmpe249-fa22/Mymodels/waymokitti_models/my3dmodel/0505/ckpt/latest_model.pth’
Model Evaluation¶
Evaluation results performed by ‘myevaluatev2.py’ are all saved in the folder of ‘/data/cmpe249-fa22/Mymodels/eval/’, the naming of the folder is ‘datasetname’+’modelname’+’epochnumber’
- In each folder, e.g., ‘/data/cmpe249-fa22/Mymodels/eval/waymokitti_dataset_mysecond_epoch128/’, there are three results (.pkl) saved by the detection function
result.pkl file: the detection results in kitti format, i.e., det_annos array. Used for evaluation
ret_dicts.pkl: the detection results, groundtruth, and inference time for each frame
txtresults: detection results saved in Kitti format, the 2D bounding box is converted from 3D bounding box.
waymokitti_dataset_mysecond_epoch128_frame_1.pkl (naming: ‘datasetname_model_name_epochnumber_framenumber’) saved whole frame data with original Lidar points and groundtruth. Input this pkl file to ‘visonebatch.py’ to visualize the 3D detection results
- The following results are saved by the evaluation function runevaluation
result_str txt file: kitti evaluation results
result_dict.pkl: recall related evaluation data
- In ** runevaluation ** , input “det_annos” from detection results
get infos from dataset.infos, each anno dict in det_annos contain the following keys: ‘point_cloud’, ‘frame_id’, ‘metadata’, ‘image’, ‘annos’, ‘pose’, and ‘num_points_of_each_lidar’ (5 Lidars)
The ‘annos’ key contain key ‘gt_boxes_lidar’ (63,9), ‘dimensions’, ‘location’, ‘heading_angles’ ,…
The ‘annos’ part are convert to eval_gt_annos via the following code
eval_det_annos = copy.deepcopy(det_annos) # contains 'boxes_lidar' (N,7) key eval_gt_annos = [copy.deepcopy(info['annos']) for info in datainfo] # contains 'gt_boxes_lidar' (N,7) key transform_annotations_to_kitti_format(eval_det_annos, map_name_to_kitti=map_name_to_kitti) transform_annotations_to_kitti_format( eval_gt_annos, map_name_to_kitti=map_name_to_kitti, info_with_fakelidar = False) result_str, result_dict = kitti_eval.get_official_eval_result(eval_gt_annos, eval_det_annos, class_names)
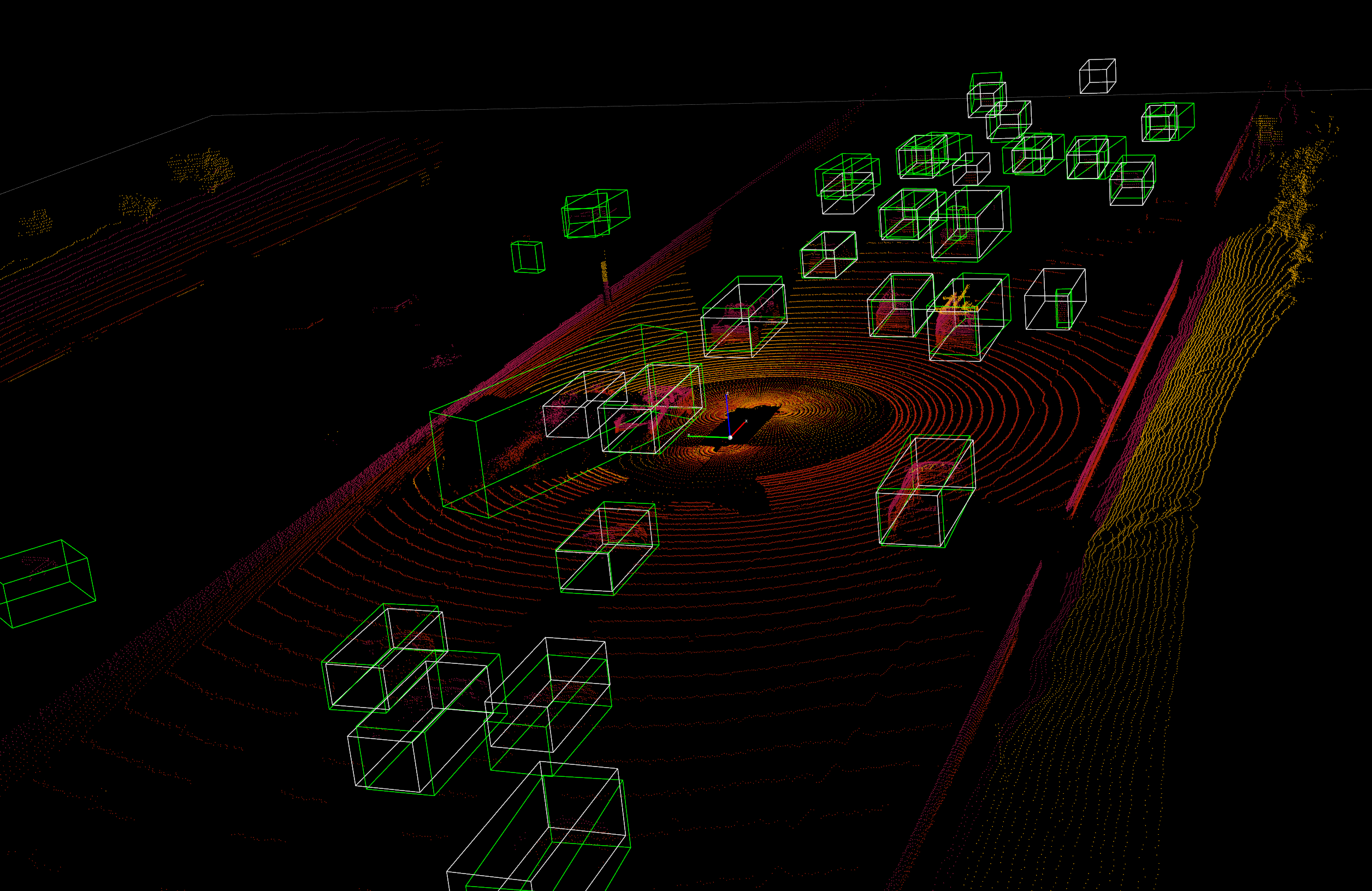
One example of the 3D detection result based on Waymokitti dataset and SECOND model is shown
Kitti Dataset Process¶
- Run create_kitti_infos in ‘mydetector3d/datasets/kitti/kitti_dataset.py’, create ‘kitti_infos_train.pkl’, ‘kitti_infos_val.pkl’, ‘kitti_infos_trainval.pkl’, and ‘kitti_infos_test.pkl’ based on split file
call dataset.get_infos to generate each info.pkl file, process each file in sample_id_list via process_single_scene, save these infos
pc_info = {'num_features': 4, 'lidar_idx': sample_idx}
info['point_cloud'] = pc_info
image_info = {'image_idx': sample_idx, 'image_shape': self.get_image_shape(sample_idx)}
info['image'] = image_info
info['calib'] = calib_info
info['annos'] = annotations
Get all labels in obj_list via self.get_label(sample_idx), where each obj is
return object3d_kitti.get_objects_from_label(label_file)
|-------[Object3d(line) for line in lines]
|-----in mydetector3d/utils/object3d_kitti.py
- annotations is created from the obj_list, and each dict contains: [‘name’], [‘truncated’], [‘occluded’], [‘alpha’], [‘bbox’], [‘dimensions’]: lhw(camera) format, [‘location’], [‘rotation_y’], [‘score’], [‘difficulty’]
‘name’ is class name string from obj.cls_type
‘truncated’ (0 non-truncated ~ 1 truncated), ‘occluded’ (0 fully visible,1,2,3 unknown), ‘alpha’ (observation angle -pi~pi) are float from original kitti label txt * alpha considers the vector from the camera center to the object center * alpha is zero when this object is located along the Z-axis (front) of the camera
‘bbox’ is from obj.box2d label[4-7]: left, top, right, bottom image pixel coordinate (int)
‘dimensions’ is 3d object size in meters [obj.l, obj.h, obj.w] * obj.l is from label[10] length * obj.h is from label[9] width * obj.w is from label[8] height
‘location’ is from obj.loc (label[11-13]) xyz in camera coordinate
‘rotation_y’ from label[14] Rotation ry around Y-axis (to the ground) in camera coordinates [-pi..pi]
‘difficulty’ is calculated by get_kitti_obj_level based on the box2d height (pixel size>40 means Easy)
These annotations values are further processed to convert the loc from camera rect coordinate to Lidar coordinate, and move the Z height of the loc_lidar (shift objects’ center coordinate (original 0) from box bottom to the center)
loc_lidar = calib.rect_to_lidar(loc)
l, h, w = dims[:, 0:1], dims[:, 1:2], dims[:, 2:3]
loc_lidar[:, 2] += h[:, 0] / 2
gt_boxes_lidar = np.concatenate([loc_lidar, l, w, h, -(np.pi / 2 + rots[..., np.newaxis])], axis=1)
annotations['gt_boxes_lidar'] = gt_boxes_lidar
Where “-(np.pi / 2 + rots” is convert kitti camera rot angle definition (camera x-axis, clockwise is positive) to pcdet lidar rot angle definition (Lidar X-axis, clockwise is negative).
My Waymokitti Dataset Process¶
My Waymokitti Dataset saved in ‘/data/cmpe249-fa22/WaymoKitti/4c_train5678’
(mycondapy39) [010796032@coe-hpc2 cmpe249-fa22]$ ls /data/cmpe249-fa22/WaymoKitti/4c_train5678/ ImageSets training waymo_gt_database waymo_infos_trainval.pkl ImageSets2 waymo_dbinfos_train.pkl waymo_infos_train.pkl waymo_infos_val.pkl
Converted Waymo dataset to Kitti format via ‘Waymo2KittiAsync.py’ in ‘https://github.com/lkk688/WaymoObjectDetection’, run the following code
[DatasetTools]$ python Waymo2KittiAsync.py
[DatasetTools]$ python mycreatewaymoinfo.py --createsplitfile_only
[DatasetTools]$ python mycreatewaymoinfo.py --createinfo_only
The groundtruth db generation is done in https://github.com/lkk688/mymmdetection3d
In mycreatewaymoinfo.py, createinfo_only will call get_waymo_image_info in ‘https://github.com/lkk688/WaymoObjectDetection/blob/master/DatasetTools/myWaymoinfo_utils.py’, it will create the following info
Waymo annotation format version like KITTI:
{
[optional]points: [N, 3+] point cloud
[optional, for kitti]image: {
image_idx: ...
image_path: ...
image_shape: ...
}
point_cloud: {
num_features: 4 #6
velodyne_path: ...
}
[optional, for kitti]calib: {
R0_rect: ...
Tr_velo_to_cam0: ...
P0: ...
}
annos: {
location: [num_gt, 3] array
dimensions: [num_gt, 3] array
rotation_y: [num_gt] angle array
name: [num_gt] ground truth name array
[optional]difficulty: kitti difficulty
[optional]group_ids: used for multi-part object
}
}
Created a new dataset file ‘mydetector3d/datasets/kitti/waymokitti_dataset.py’ based on kitti_dataset.py.
Waymo Dataset Process¶
Prepare the dataset¶
- In ‘mydetector3d/datasets/waymo/waymo_dataset.py’, specify the ‘–func’ in main to select different preprocessing functions.
mycreateImageSet: Create the folder ‘ImageSets’ for the list of train val split file names under ‘/data/cmpe249-fa22/Waymo132/ImageSets/’
mygeninfo: create info files based on the provided folder list, the processed_data_tag=’train0to9’
mygengtdb: create the groundtruth database via create_waymo_gt_database function
- In ** mygeninfo ** function:
call waymo_utils.process_single_sequence for each tfrecord sequence file, all returned infos dict list are saved in train0to9_infos_train.pkl under root folder ‘/data/cmpe249-fa22/Waymo132/’
waymo_utils.process_single_sequence created one folder for each sequence under the folder ‘/data/cmpe249-fa22/Waymo132/train0to9’. One pkl file contains list of all sequence info is saved, including annotations (via generate_labels).
- generate_labels in mydetector3d/datasets/waymo/waymo_utils.py
utilize waymo frame.laser_labels for box annatation, loc = [box.center_x, box.center_y, box.center_z], dimensions.append([box.length, box.width, box.height]) the same to the unified coordinate of OpenPCDet
annotations contains ‘heading_angles’, ‘speed_global’, ‘accel_global’ are not in Kitti, Kitti’s ‘alpha’, ‘rotation_y’ are not in here
annotations[gt_boxes_lidar] is calcuated from
if annotations['name'].__len__() > 0:
#get speed
gt_boxes_lidar = np.concatenate([
annotations['location'], annotations['dimensions'], annotations['heading_angles'][..., np.newaxis], speed], axis=1)
else:
gt_boxes_lidar = np.zeros((0, 9))
annotations['gt_boxes_lidar'] = gt_boxes_lidar
save_lidar_points save each frame’s lidar data as one npy file (frame index as the name) under the sequence folder, 3d points in vehicle frame.
- In ** mygengtdb ** function->create_waymo_gt_database:
call dataset.create_groundtruth_database (in waymo_dataset.py) for ‘train’ split
created ‘%s_gt_database_%s_sampled_%d_global.npy’ (stacked_gt_points) and ‘%s_waymo_dbinfos_%s_sampled_%d.pkl’ (array of dbinfo dict) under the root folder
each dbinfo is the following dict, each item is the groundtruth object with its gt_boxes and gt_points
db_info = {'name': names[i], 'path': db_path, 'sequence_name': sequence_name, 'sample_idx': sample_idx, 'gt_idx': i, 'box3d_lidar': gt_boxes[i], 'num_points_in_gt': gt_points.shape[0], 'difficulty': difficulty[i]}
created ‘%s_gt_database_%s_sampled_%d’ folder under the root
Prepare all dataset¶
(mycondapy39) [010796032@cs001 waymo]$ python waymo_dataset.py --func 'mycreateImageSet'
Total files: 648
Train size: (518, 1)
Val size: (130, 1)
Done in /data/cmpe249-fa22/Waymo132/ImageSets/trainval.txt
Done in /data/cmpe249-fa22/Waymo132/ImageSets/train.txt
Done in /data/cmpe249-fa22/Waymo132/ImageSets/val.txt
(mycondapy39) [010796032@cs001 waymo]$ python waymo_dataset.py --func 'mygeninfo'
totoal number of files: 648
(mycondapy39) [010796032@cs001 3DDepth]$ python mydetector3d/datasets/waymo/waymo_dataset.py --func 'mygengtdb'
Total samples for Waymo dataset: 6485
---------------Start create groundtruth database for data augmentation---------------
2023-05-08 18:06:49,870 INFO Loading Waymo dataset
2023-05-08 18:07:23,908 INFO Total skipped info 0
2023-05-08 18:07:23,908 INFO Total samples for Waymo dataset: 25867
Database Vehicle: 244715
Database Pedestrian: 231457
Database Cyclist: 11475
---------------Data preparation Done---------------
Initialize the dataset during training¶
- Initialize class DatasetTemplate (in dataset.py), setup three processors specified in “DATA_PROCESSOR” section of the configuration file “mydetector3d/tools/cfgs/dataset_configs/mywaymo_dataset.yaml”
point_feature_encoder (based on dataset_cfg.POINT_FEATURE_ENCODING),
data_augmentor (based on dataset_cfg.DATA_AUGMENTOR),
data_processor (based on dataset_cfg.DATA_PROCESSOR). Get grid_size and voxel_size from data_processor.
self.grid_size = self.data_processor.grid_size #[1504, 1504, 40] = POINT_CLOUD_RANGE/voxel_size self.voxel_size = self.data_processor.voxel_size #[0.1, 0.1, 0.15]meters
- Initialize class WaymoDataset in ‘mydetector3d/datasets/waymo/waymo_dataset.py’, read infos[] via include_waymo_data function
In ** include_waymo_data ** function: Iterate through sample_sequence_list (all tfrecord files), load pkl file as infos in each sequence folder, add all together to infos[].
- In ** __getitem__ ** function
Get point cloud info pc_info, then get the lidar points [N,5] [x, y, z, intensity, elongation]
pc_info = info['point_cloud'] sequence_name = pc_info['lidar_sequence'] sample_idx = pc_info['sample_idx'] points = self.get_lidar(sequence_name, sample_idx) #load the npy file, limit the intensity from -1 to 1 input_dict.update({ 'points': points, 'frame_id': info['frame_id'], })
Get ‘annos’ in info
gt_boxes_lidar = annos['gt_boxes_lidar'] #[N,9] gt_boxes_lidar = gt_boxes_lidar[:, 0:7] #[54,8] not use speed information #FILTER_EMPTY_BOXES_FOR_TRAIN input_dict.update({ 'gt_names': annos['name'], #class string names [54,] 'gt_boxes': gt_boxes_lidar, #[54,7] 'num_points_in_gt': annos.get('num_points_in_gt', None) #[54,] })
Call data_dict = self.prepare_data(data_dict=input_dict) (DatasetTemplate)
data_dict = self.data_augmentor.forward # perform data augmentation data_dict['gt_boxes'] = gt_boxes #Filter gt_boxes, convert gt_names to index and add to gt_boxes last column [Ngt,7]->[Ngt,8] data_dict = self.point_feature_encoder.forward(data_dict) #do feature encoder for points [N,5], only add use_lead_xyz=True data_dict = self.data_processor.forward #pre-processing for the points remove out of range ponts, shuffle, and convert to voxel (transform_points_to_voxels in data_processor.py)
transform_points_to_voxels in data_processor.py
voxel_output = self.voxel_generator.generate(points) # get voxels (64657, 5, 5), coordinates (64657, 3), num_points (64657,) data_dict['voxels'] = voxels data_dict['voxel_coords'] = coordinates data_dict['voxel_num_points'] = num_points
get the final data_dict
‘gt_boxes’: (16, 16, 8), 16: batch size, 16: number of boxes (many are zeros), 8: boxes value
‘points’: (302730, 5): 5: add 0 in the left of 4 point features (xyzr)
Voxels: (89196, 32, 4) 32 is max_points_per_voxel 4 is feature(x,y,z,intensity)
Voxel_coords: (89196, 4) (batch_index,z,y,x) added batch_index in dataset.collate_batch
Voxel_num_points: (89196,)
Start the training for all waymo data
(mycondapy39) [010796032@cs001 3DDepth]$ python mydetector3d/tools/mytrain.py
2023-05-08 19:16:49,940 INFO cfg_file mydetector3d/tools/cfgs/waymo_models/my3dmodel.yaml
2023-05-08 19:16:49,940 INFO batch_size 8
2023-05-08 19:16:49,940 INFO epochs 256
2023-05-08 19:16:49,940 INFO workers 4
2023-05-08 19:16:49,940 INFO extra_tag 0508
2023-05-08 19:16:49,940 INFO ckpt /data/cmpe249-fa22/Mymodels/waymo_models/my3dmodel/0507/ckpt/checkpoint_epoch_128.pth
2023-05-08 19:16:49,967 INFO ----------- Create dataloader & network & optimizer -----------
2023-05-08 19:16:53,197 INFO Database filter by min points Vehicle: 244715 => 209266
2023-05-08 19:16:53,222 INFO Database filter by min points Pedestrian: 231457 => 196642
2023-05-08 19:16:53,225 INFO Database filter by min points Cyclist: 11475 => 10211
2023-05-08 19:16:53,248 INFO Database filter by difficulty Vehicle: 209266 => 209266
2023-05-08 19:16:53,271 INFO Database filter by difficulty Pedestrian: 196642 => 196642
2023-05-08 19:16:53,272 INFO Database filter by difficulty Cyclist: 10211 => 10211
2023-05-08 19:16:53,323 INFO Loading Waymo dataset
2023-05-08 19:16:54,998 INFO Total skipped info 0
2023-05-08 19:16:54,998 INFO Total samples for Waymo dataset: 25867
2023-05-08 19:16:54,998 INFO Total sampled samples for Waymo dataset: 5174
Num point features initial 5
Num point features after VFE 64
num_bev_features features after BEV 64
num_bev_features features after backbone2d 384